Looks like you got lost!
We couldn’t find the page you were looking for.
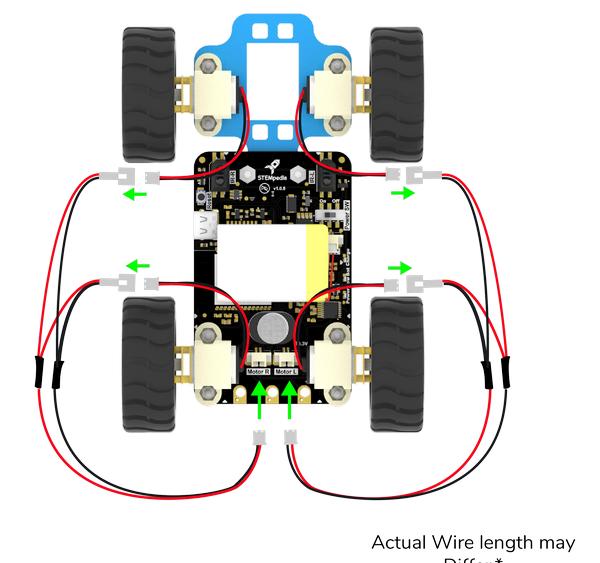
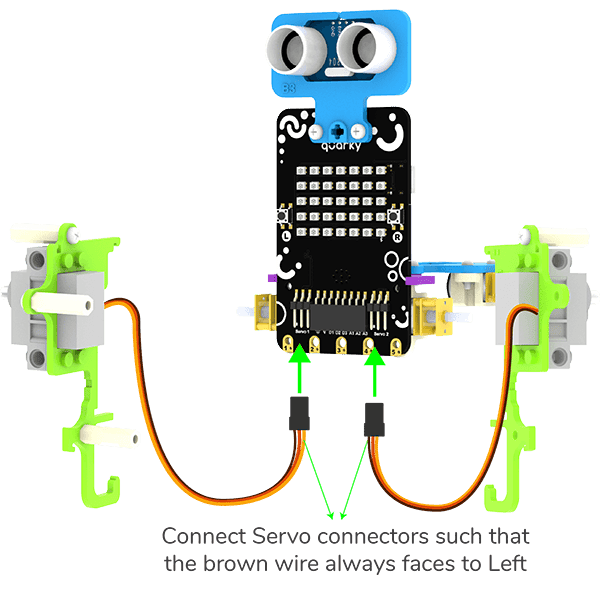
 We are starting with the Horizontal Robot.
We are starting with the Horizontal Robot.

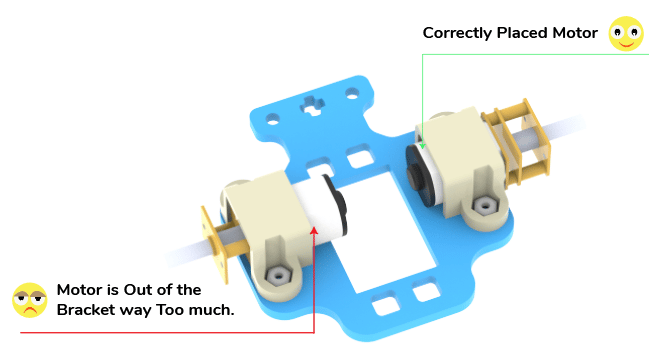
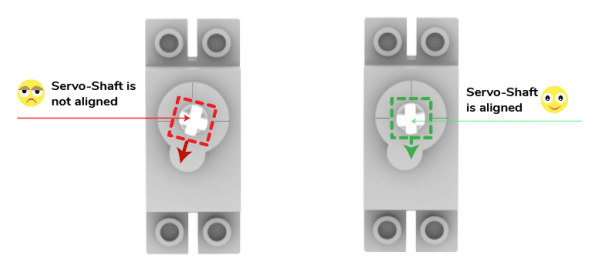
 Note: You have to make sure the Motor is appropriately mounted.
Note: You have to make sure the Motor is appropriately mounted.
 Note: Make sure the B1 is written on the opposite side of the Motor.
Note: Make sure the B1 is written on the opposite side of the Motor.
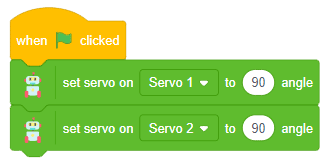

 We will continue to program the robot in the next lesson.
We will continue to program the robot in the next lesson.