Looks like you got lost!
We couldn’t find the page you were looking for.
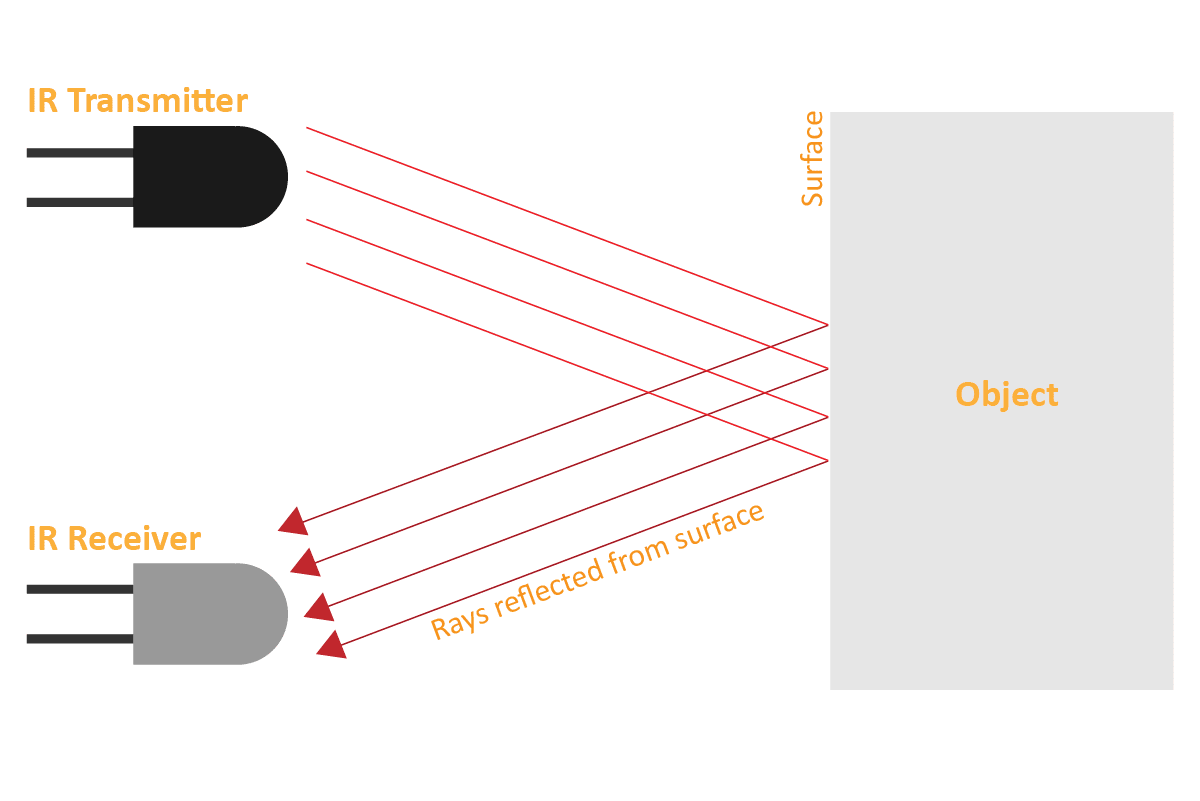
 Let’s understand how they work.
Let’s understand how they work.
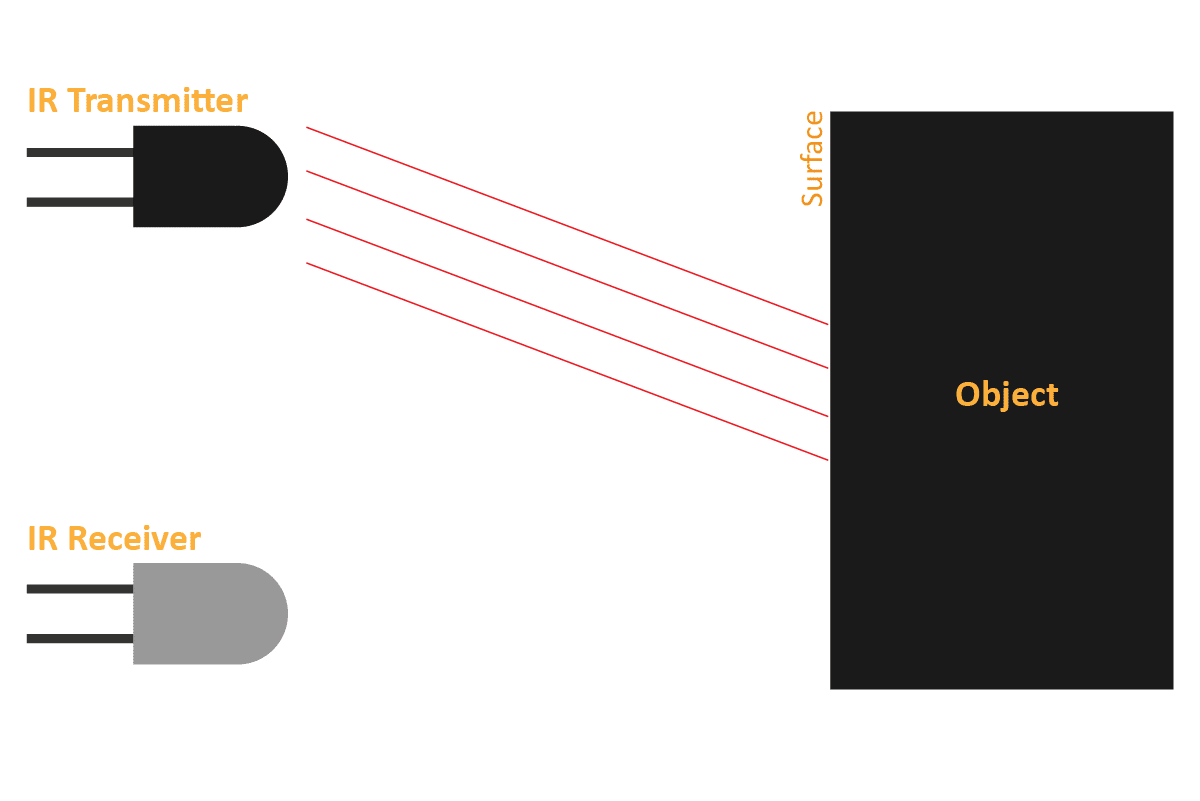
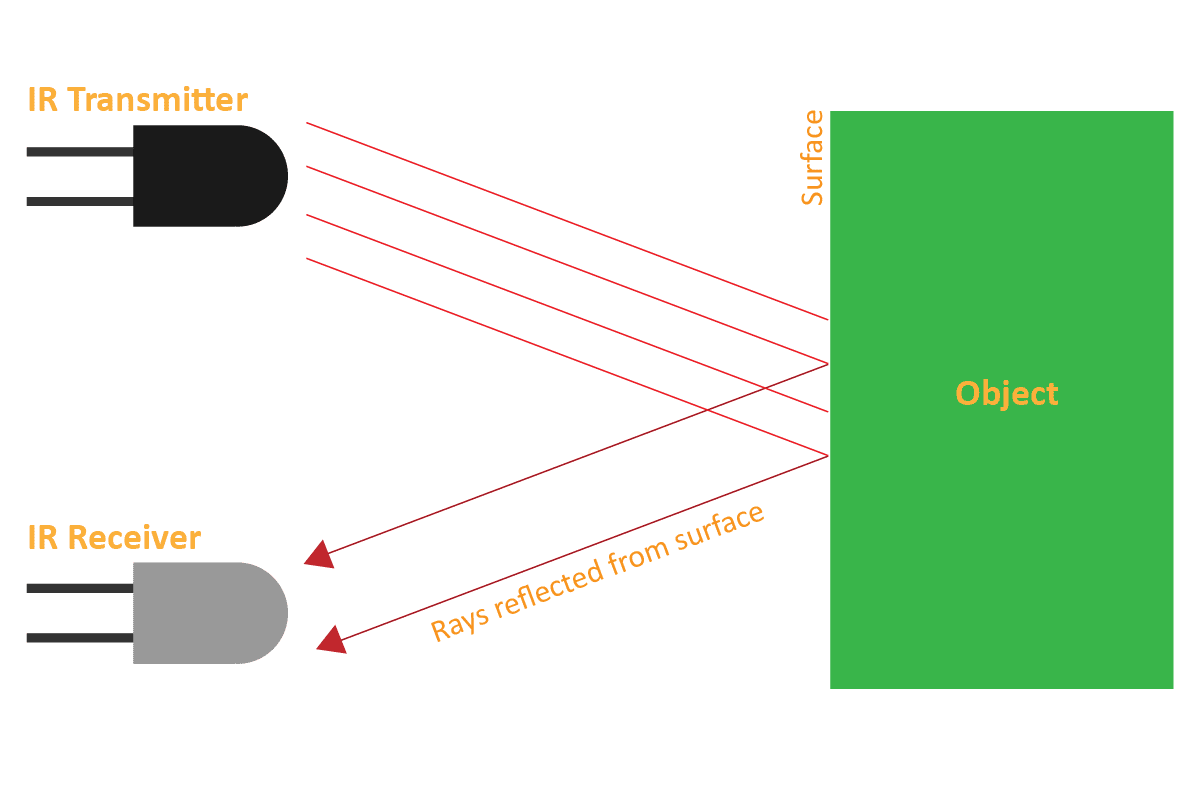 But to detect colors, we depend on the number of rays the surface reflects:
But to detect colors, we depend on the number of rays the surface reflects:

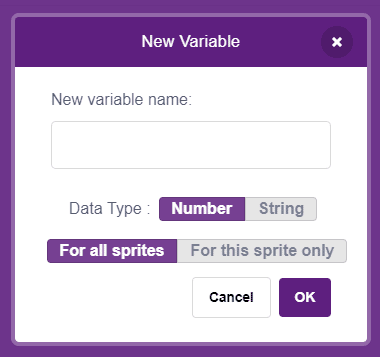
 You will notice that it appears in the top-left corner of the stage. We’ll use this variable to find out the threshold value for our IR sensors.
You will notice that it appears in the top-left corner of the stage. We’ll use this variable to find out the threshold value for our IR sensors.
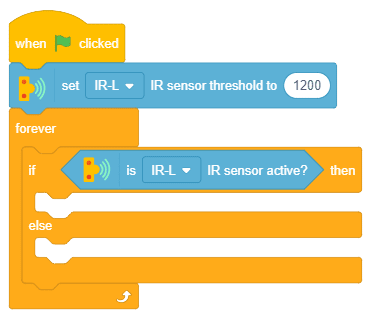
 Repeat the process for the second i.e. the right IR sensor. Note that it is possible for the values of both the sensors to be different.
Repeat the process for the second i.e. the right IR sensor. Note that it is possible for the values of both the sensors to be different.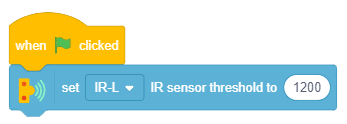
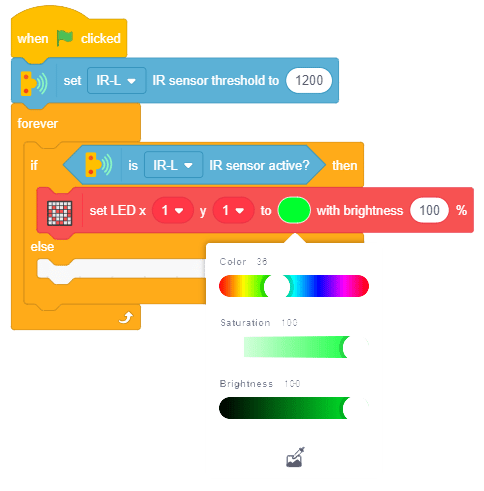
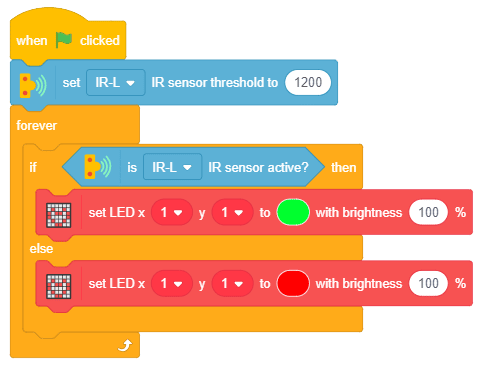
 Now, run the script by clicking the green flag and bringing the black line of the track close to the right IR sensor.
Now, run the script by clicking the green flag and bringing the black line of the track close to the right IR sensor.